What you need:
* 2 X pieces of wood 4X6. 1/4” and the other 1/2” thick
* 1 X 3 inches pipe. length varies depending of the deep of your pit.
* A couple of screw
* 1 X 1k resistor
* 1 X Raspberry pi
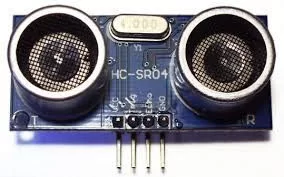
* 1X HC-SR04 ultrasonic sensor
* Wire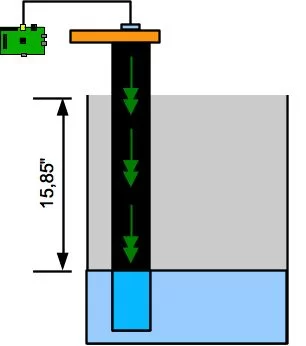
Step 1: The Sensor
Step 2: Create the Base
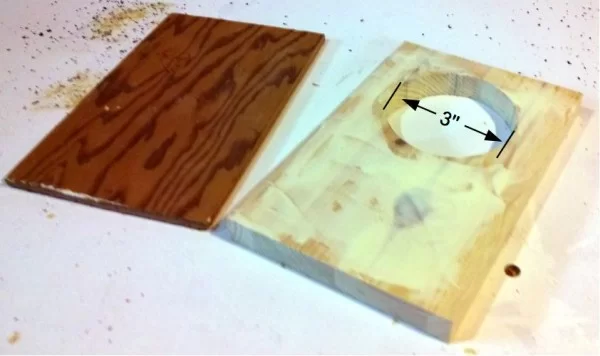 First, cut a 3 inches hole in the thicker 4”X6” piece of wood. Stick the pieces of wood together.
First, cut a 3 inches hole in the thicker 4”X6” piece of wood. Stick the pieces of wood together.
Step 3: Prepare the Base for the Sensor.
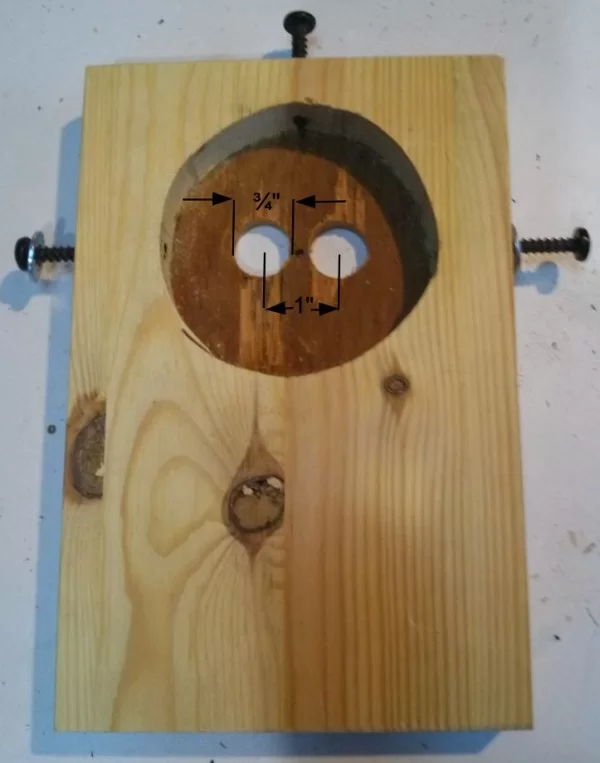
Drill two 3/4” hole in the center of the 3” hole. The distance between them is 1”. Add 3 screw to hold the pipe.
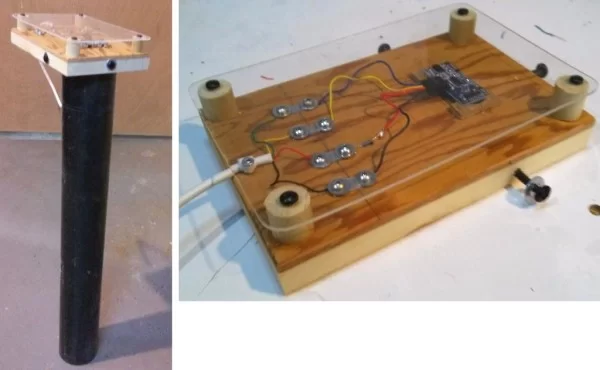
Step 4: Add the Sensor
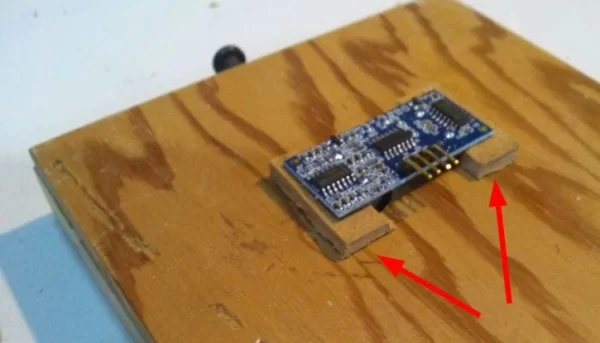
Mount the sensor on 2 spacer to keep the sensor level. Stick the sensor to the spacer with hot glue.
Step 5:
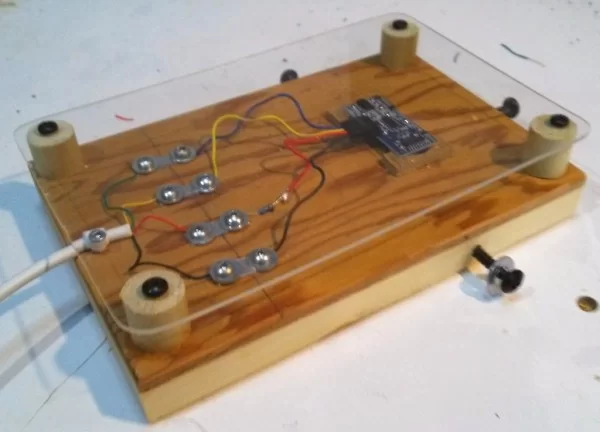
Add 8 screw to hold the wired. Optional: add a plexyglass cover to protect your masterpiece.
Step 6: Connection
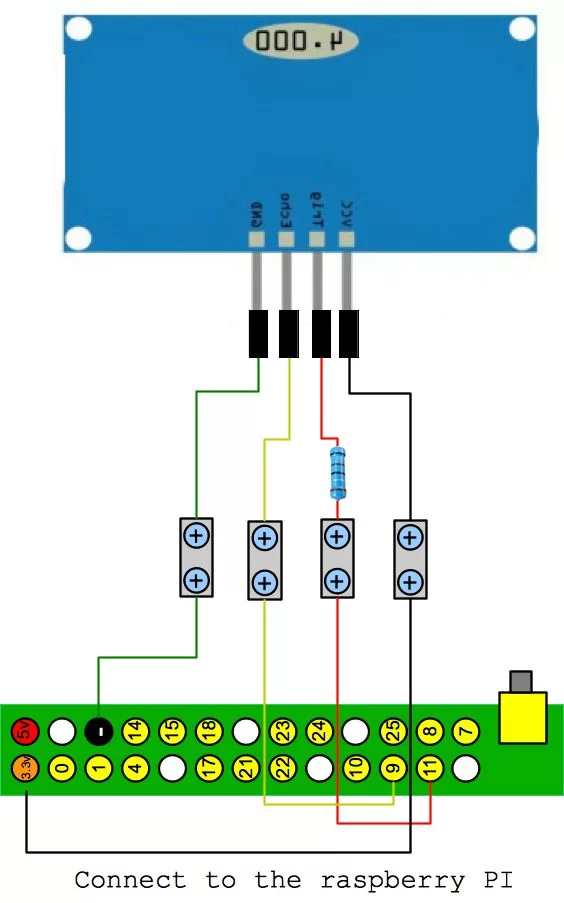
How to connect to the raspberry:
Pin 1 GND: connect to the ground of the rasp.
Pin 2 Echo to gpio 9
Pin 3 Trig to gpio 11. Add a 1k resistor
Pin 4 VCC to the 3.3V
Note 1: According to the manual, the sensor used 5v. But it work perfectly at 3.3v.
Note 2: Beware, we see the back of the sensor in this pic, so the order of the pin are reverse.
Step 7: Add the Pipe

Add the pipe to the controller and thighten the 3 screw.
Step 8: The Code
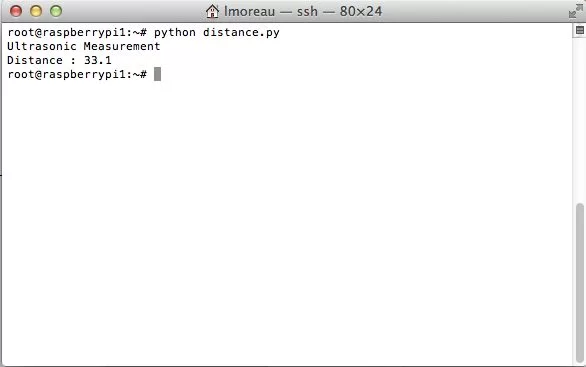
First, you need to save the code on the rasp with the extension *.py. Then run the command python myfile.py
Code:
#!/usr/bin/python #+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+ #|R|a|s|p|b|e|r|r|y|P|i|-|S|p|y|.|c|o|.|u|k| #+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+ # # ultrasonic_1.py # Measure distance using an ultrasonic module # # Author : Matt Hawkins # Date : 09/01/2013 # Import required Python libraries import time import RPi.GPIO as GPIO # Use BCM GPIO references # instead of physical pin numbers GPIO.setmode(GPIO.BCM) # Define GPIO to use on Pi GPIO_TRIGGER = 11 GPIO_ECHO = 9 # You need to change the variable "compensation" according to the distance from the edge of the pit to the sensor compensation = -11 print "Ultrasonic Measurement" # Set pins as output and input GPIO.setup(GPIO_TRIGGER,GPIO.OUT) # Trigger GPIO.setup(GPIO_ECHO,GPIO.IN) # Echo # Set trigger to False (Low) GPIO.output(GPIO_TRIGGER, False) # Allow module to settle time.sleep(0.5) # Send 10us pulse to trigger GPIO.output(GPIO_TRIGGER, True) time.sleep(0.00001) GPIO.output(GPIO_TRIGGER, False) start = time.time() while GPIO.input(GPIO_ECHO)==0: start = time.time() while GPIO.input(GPIO_ECHO)==1: stop = time.time() # Calculate pulse length elapsed = stop-start # Distance pulse travelled in that time is time # multiplied by the speed of sound (cm/s) distance = elapsed * 34000 # That was the distance there and back so halve the value distance = distance / 2 distance = distance + compensation print "Distance : %.1f" % distance # Reset GPIO settings GPIO.cleanup()
Note: You need to change the variable “compensation” according to the distance from the edge of the pit to the sensor
Note 2: The distance are in cm.
Thank to Matt Hawkins for this code
Step 9: Final Result
Voila! All you have to do now is to fixed the sensor in your pit.
Step 10: Next Tutorial
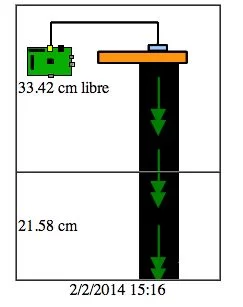
In the next week, I will show you how to present the result of the sensor on a web page.
I’m not as good as I want to in english, so feel free to send me any correction in my text.
About The Author
Hassan Zaka
I am an expert in accounting and possess diverse experience in technical writing. I have written for various industries on topics such as finance, business, and technology. My writing style is clear and simple, and I utilize infographics and diagrams to make my writing more engaging. I can be a valuable asset to any organization in need of technical writing services.
Follow Us:LinkedinTwitter