Squirt is a motion activated water cannon using Arduino.
This was designed for use in the garden but as it’s winter we tested it in the bathroom. It works!

True motion tracking is expensive and complicated so this system activates when the victim moves into range and randomises the position of the cannon and the firing time within a limited area. The sometimes fickle readings from the PIR sensor just adds to the cannon’s randomness, and therefore the fun.
This is my first Arduino project.
Step 1: Parts

Windscreen washer pump
PIR motion detector
servo motor
TIP 120 npn transistor
10k resistor
1N4004 diode
12v rechargeable NiMH battery
on/off switch
watertight box to house the workings
Watertight reservoir
Various length 22 awg jumper leads
Soft tubing
Short length of pipe
Breadboard
Step 2: The Circuit
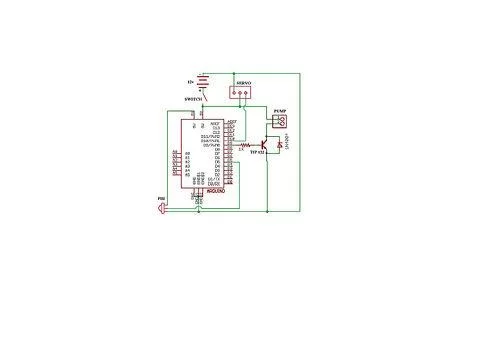
The PIR command wire goes to Digital pin 5 on the arduino and its positive wire goes to 3v pin and ground to ground.
Servo control wire is on pin10.
Pump is on pin 8 via the transistor 9which is protected by the diode).
The battery is a NiMH 12v connected to Vin pin via an on/off switch.
The battery, breadboard and arduino are housed inside a watertight sandwich box.
Mounted on top is the PIR which is inside a length of plastic tube to restrict its field of vision to directly ahead.
The servo is mounted on top of the water reservoir- in this case a plastic tub from the kitchen supplies department of the local supermarket. The pump is fitted near the bottom of the tub with its outlet connected to a flexible pipe from an aquarium supply shop and (rather messily) attached to the sevo arm with a lump of blu-tac.
Step 3: The Code

#include <ServoTimer1.h>
/*
- “Squirt”. Jonathan Robson Feb 2009.
*
- A PIR activates a servo & pump. Servo moves its arm to a random position between 60 and
- 120 degrees, fires a pump for half second and returns to center (90 degrees). Cycle repeats
- 3 times at random intervals between half and 3 seconds then waits to detect further movement.
- Circuit based on http://itp.nyu.edu/physcomp/Tutorials/HighCurrentLoads
- PIR code adapted from https://learn.adafruit.com/pir-passive-infrared-proximity-motion-sensor/using-a-pir-w-arduino
- Random code adapted from www.arduino.cc/en/Tutorial/Blink & www.arduino.cc/en/Reference/Random
- Servo code adapted from http://www.ladyada.net/make/mshield/use.html
*/
int transistorPin = 8; // transistor base connected to pin 8
ServoTimer1 servo1; // defines the servo
long randOff = 0; // Initialise a variable for the OFF time between shots
long randNumber; // Initialise a variable for servo position angle and delay between shots
void setup()
{
servo1.attach(10); //servo on pin 10
pinMode(8, OUTPUT); // set the transistor pin 8 as output to pump
pinMode(5, INPUT); // set the PIR pin 5 as input
digitalWrite(8, LOW); // defines LOW as movement
randomSeed (analogRead (0)); // randomize
}
int pinin = 0;
long countint = 0;
void loop()
{
pinin = digitalRead(5); // reads the PIR sensor
while (pinin == 0)
{
pinin = digitalRead(5);
}
servo1.write(90); //sets servo to center
randOff = random (500, 3000); // generate OFF time between 1/2 and 3 seconds
delay(randOff); // waits for a random time while OFF
servo1.write(randNumber = random(60, 120)); // servo to random position within 30 degrees of center
delay(400); //gives servo time to get there
digitalWrite(transistorPin, HIGH); // turns pump on
delay(500); //fires pump for 1/2 second
digitalWrite(transistorPin, LOW); // turns pump off
servo1.write(90); // moves servo back to center
randOff = random (500, 3000); // generate new OFF time between 1/2 and 3 seconds and repeat
delay(randOff);
servo1.write(randNumber = random(60, 120));
delay(400);
digitalWrite(transistorPin, HIGH);
delay(500);
digitalWrite(transistorPin, LOW);
servo1.write(90);
randOff = random (500, 3000); // generate OFF time between 1/2 and 3 seconds and repeat
delay(randOff);
servo1.write(randNumber = random(60, 120));
delay(400);
digitalWrite(transistorPin, HIGH);
delay(500);
digitalWrite(transistorPin, LOW);
servo1.write(90);
delay(3000); // gives the PIR time to “settle” before reading again
}
About The Author
Hassan Zaka
I am an expert in accounting and possess diverse experience in technical writing. I have written for various industries on topics such as finance, business, and technology. My writing style is clear and simple, and I utilize infographics and diagrams to make my writing more engaging. I can be a valuable asset to any organization in need of technical writing services.
Follow Us:LinkedinTwitter