
Version 1

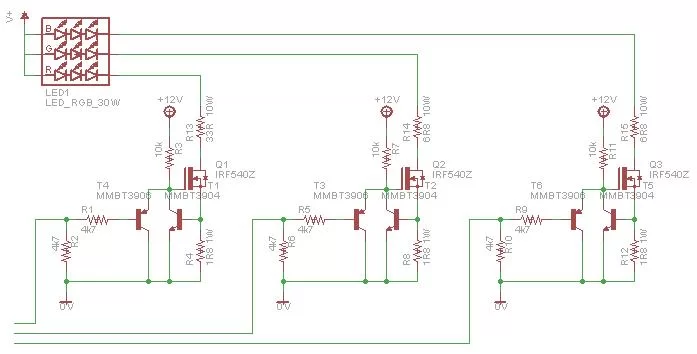
Driving the LEDs

Controlling the LEDs
Bit-Banging 18 Channels at 1000 Hz
Conclusion

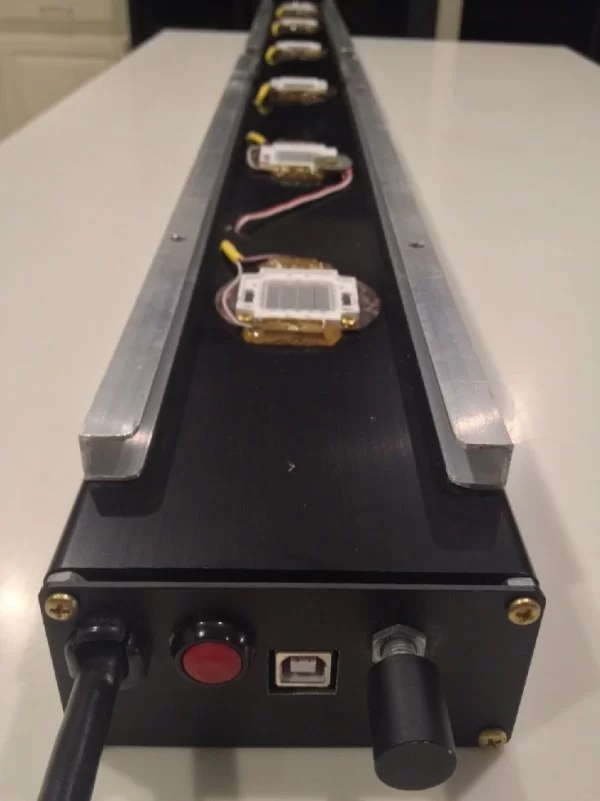
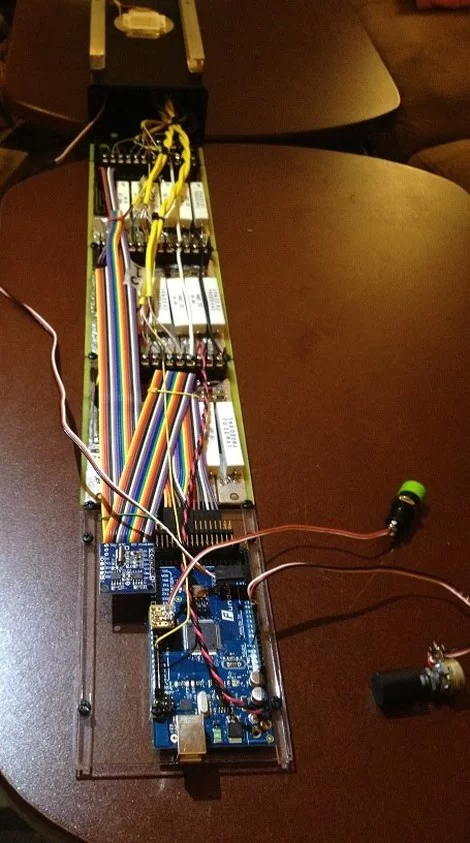
When running at full power, the housing right around the LED driver circuitry can become uncomfortable to the touch, and is much cooler down at the other end where the fan is mounted. It appears as if the major problems of Version 0 have been solved. While LEDs are generally quite efficient, I’m not thrilled about wasting 24 Watts just to step the voltage down to the red ones. I’m sure some future project will tackle this and several other opportunities.
About The Author
Hassan Zaka
I am an expert in accounting and possess diverse experience in technical writing. I have written for various industries on topics such as finance, business, and technology. My writing style is clear and simple, and I utilize infographics and diagrams to make my writing more engaging. I can be a valuable asset to any organization in need of technical writing services.
Follow Us:LinkedinTwitter